










الروبوت رباعي الأرجل دي 1 برو
26,286.00 ر.س
روبوت رباعي الأرجل مدمج بقدرات حركة ذكية تعتمد على الذكاء الاصطناعي، سرعة 3.5 م/ث، عزم 48 نيوتن متر، نقل فيديو مباشر، وحركات متقدمة تناسب التعليم والأبحاث والعروض الترفيهية.
الروبوت رباعي الأرجل دي 1 برو: قوة، رشاقة، وجاهزية تامة
دي 1 برو روبوت رباعي الأرجل مدمج وعالي الأداء، صُمم لتقديم قدرات حركة متقدمة في مجالات العروض الترفيهية والأبحاث العلمية والتعليم. يعتمد على خوارزميات الحركة المدعومة بالتعلم المعزز، مما يمكنه من التكيف الذكي مع مختلف أنواع التضاريس والحفاظ على التوازن وتقديم أداء سريع ومستقر في منصة روبوتية خفيفة الوزن.
سيناريوهات استخدام متعددة
منصة صُممت للابتكار والتفاعل. بفضل حمولته الفعالة الرائعة التي تبلغ 5 كجم وقدرته على التحمل الممتدة من ساعة إلى ساعتين، يُعد دي 1 برو الرفيق الروبوتي الأمثل لمجموعة متنوعة من الاستخدامات، حيث يعمل بشكل مثالي كعنصر جذب ديناميكي للعروض الترفيهية أو كمنصة عالية الكفاءة للبحث العلمي والتعليم.
حركة ذكية بالتعلم المعزز
يعتمد دي 1 برو على نظام حركة مدعوم بالتعلم المعزز (RL)، مما يسمح له بالتكيف تلقائيًا مع الأسطح والعوائق المختلفة. يوفر النظام توازنًا ذاتيًا وحماية من السقوط ومقاومة للاضطرابات، مما يضمن حركة مستقرة وموثوقة حتى في البيئات الصعبة.
أداء قوي على مختلف التضاريس
صُمم الروبوت للتنقل بكفاءة عالية، حيث تصل سرعته إلى 3.5 متر/ثانية، ويمكنه صعود السلالم بارتفاع يصل إلى 16 سم، والقفز عموديًا حتى 35 سم، والتعامل مع المنحدرات حتى 40 درجة. هذه القدرات تجعله مناسبًا للاستخدام في البيئات الداخلية والخارجية.
نظام محركات عالي الأداء
يتميز دي 1 برو بمحركات عالية الكثافة للطاقة توفر عزم دوران يصل إلى 48 نيوتن متر، مما يمنحه قدرة ممتازة على التعامل مع الأحمال والظروف التشغيلية الصعبة. كما تم تصميمها لتحمل الصدمات والعمل لفترات طويلة بكفاءة عالية.
تشغيل فوري دون معايرة
بفضل نظام التحكم المزدوج بالمشفرات، لا يحتاج دي 1 برو إلى معايرة نقطة الصفر عند التشغيل، مما يسمح باستخدامه مباشرة بعد التشغيل ويوفر الوقت ويزيد من كفاءة العمل.
منصة مرنة للتطوير
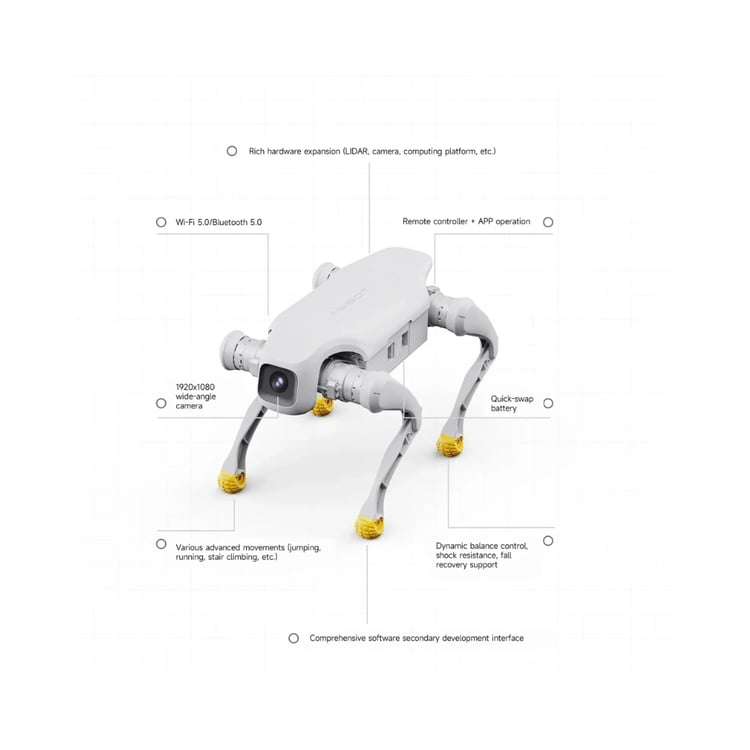
يتوافق الروبوت مع مجموعة واسعة من الوحدات المتقدمة مثل أنظمة LiDAR وكاميرات العمق ووحدات (RTK) لتحديد المواقع وأنظمة نقل الصور ووحدات الاتصال 4 جي و5 جي. كما يدعم نماذج (URDF) للمحاكاة والاختبار في بيئات الروبوتات الاحترافية.
حركات روبوتية متقدمة
يوفر دي 1 برو مجموعة متنوعة من الحركات الأساسية والمتقدمة، مثل الوقوف والاستلقاء ووضع امتصاص الصدمات وتعديل الارتفاع والميل والدوران الأفقي والقفز والوقوف على قدمين والتلويح وحتى تنفيذ الشقلبة الخلفية، مما يجعله مناسبًا للعروض والأبحاث والتطبيقات التفاعلية.
التحكم عن بعد ونقل الصورة
يدعم الروبوت نقل الصورة في الوقت الفعلي والتحكم اللاسلكي عبر عصا التحكم، مما يتيح للمستخدمين قيادة الروبوت ومتابعة مهامه عن بُعد بسهولة.
المواصفات
- المواد: سبائك الألومنيوم مع بلاستيك هندسي عالي القوة
- أبعاد الوقوف (الطول × العرض × الارتفاع): 635 مم × 360 مم × 420 مم
- أبعاد الاستلقاء (الطول × العرض × الارتفاع): 675 مم × 435 مم × 145 مم
- الوزن الإجمالي (مع البطارية): 15.5 كجم
- درجة حرارة التشغيل: 0 درجة مئوية ~ 40 درجة مئوية
- درجات الحرية (DoF): الآلة بأكملها: 12، كل ساق: 3
- مدة الشحن: حوالي ساعة واحدة (مستوى البطارية 10%-90%)
- عمر البطارية (وقت التشغيل): 1–2 ساعة
- نطاق التشغيل: 6 كم ± 1 كم
- قوة الحوسبة الأساسية: وحدة معالجة مركزية (CPU) عالية الأداء بـ 8 أنوية
- أقصى طاقة تشغيل: 3500 واط
- السرعة القصوى: 3.5 م/ث
- الحمولة الفعالة: 5 كجم
- ارتفاع تسلق السلالم المستمر: 16 سم
- أقصى منحدر تسلق: 30 درجة
- ارتفاع القفز العمودي: 35 سم
- نوع المشغل: وحدة حركة عالية كثافة الطاقة
- أقصى عزم دوران للمفصل: 48 نيوتن متر
- محرك مفصلي دقيق بغلاف من سبائك الألومنيوم: 12
- نطاق حركة المفصل (الجسم): -28° ~ 28°
- نطاق حركة المفصل (الفخذ): -170° ~ 66°
- نطاق حركة المفصل (الساق): 35° ~ 156°
- مجال رؤية الكاميرا (FOV): مجال رؤية الكاميرا: 122° قطري، 111° أفقي، 70° عمودي
- وحدة القياس بالقصور الذاتي (IMU): إصدار قياسي
- الحركات القياسية: الوقوف، الاستلقاء، وضع التخميد، تعديل الميل، تعديل الارتفاع، الدوران الأفقي
- حركات خاصة: القفز للأمام، القفز للأعلى، الوقوف على قدمين، الشقلبة الخلفية، التلويح، إلخ
- نقل الصور في الوقت الفعلي: مدعوم
- التطوير الثانوي (SDK): غير مدعوم
- منافذ التوسيع الوظيفية: لا يوجد
- البطارية: السعة المقدرة: 4.6 أمبير/ساعة، الجهد: 43.2 فولت
- محول الطاقة: قياسي
- قاعدة الشحن: قياسية
- التحكم عن بعد: جهاز تحكم عن بعد بعصا توجيه (Joystick)








