




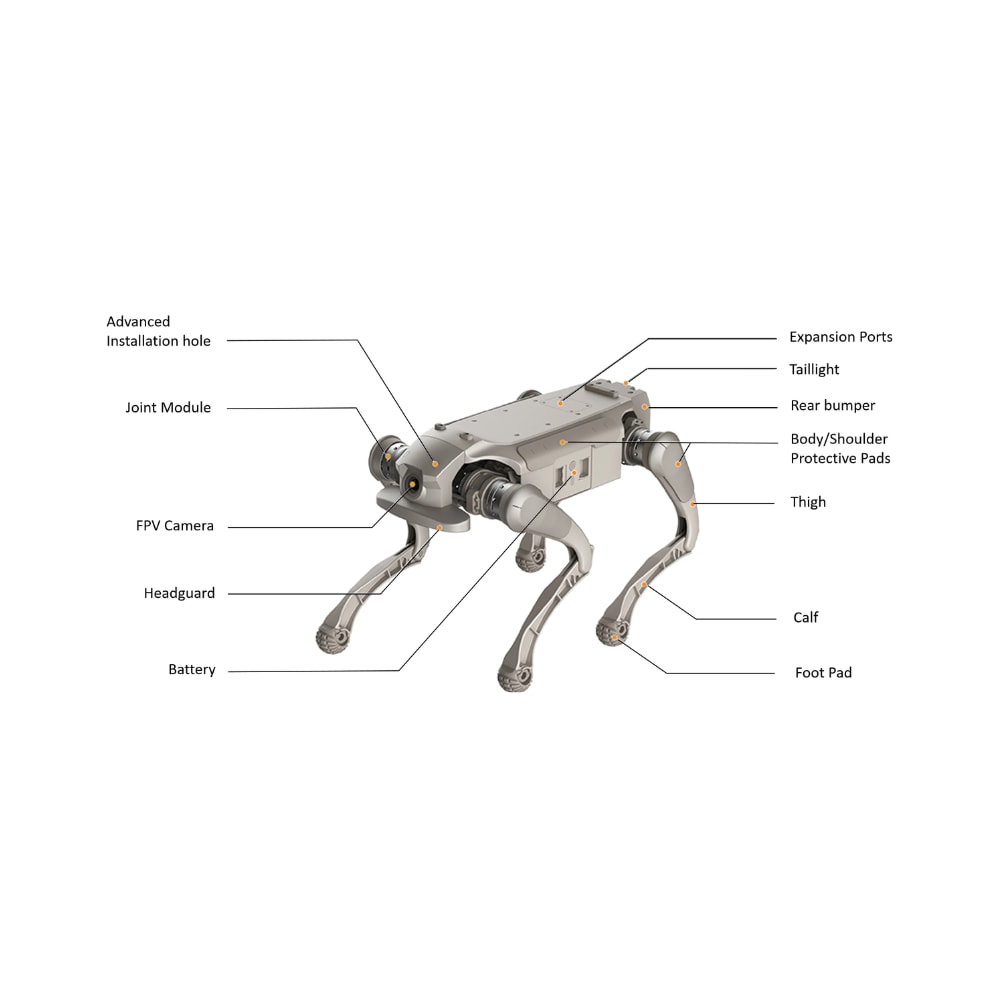





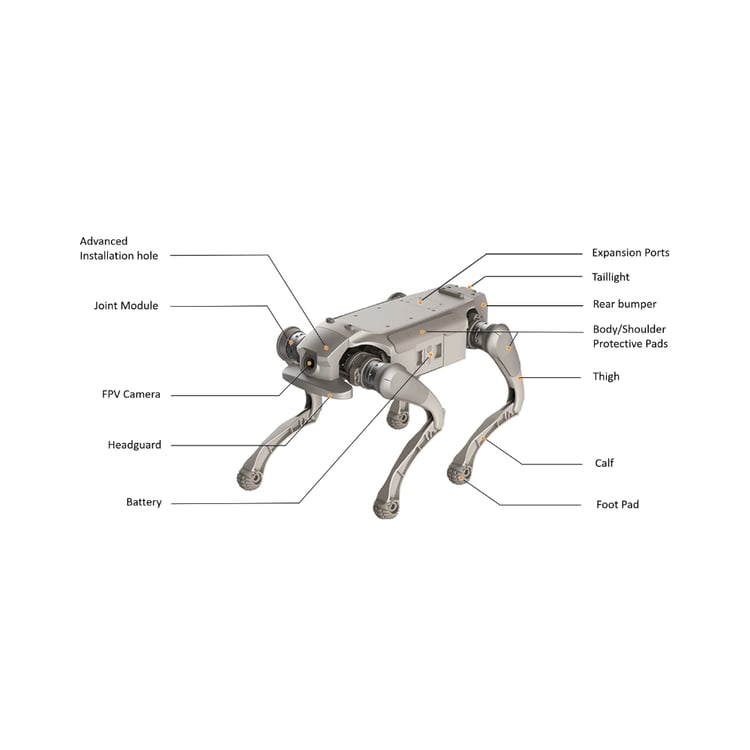
D1 Ultra Quadruped Robot
SAR 52,658.00
A professional AI-powered quadruped robot built for seamless terrain adaptation. Combining extreme agility at 3.7 m/s and 48 Nm of torque, its rugged all-weather design unlocks limitless use-case possibilities.
D1 Ultra Quadruped Robot: Swift, Agile, and Unstoppable
The D1 Ultra is a compact, high-performance quadruped robot engineered for industrial, research, educational, and security applications. Powered by advanced reinforcement learning algorithms, it can autonomously adapt to complex environments, maintain balance, and navigate challenging terrain with remarkable agility. Combining rugged construction, powerful motors, and an open development ecosystem, D1 Ultra delivers professional-grade robotic mobility in a highly portable platform.
Limitless Application Scenarios
From securing perimeters to advancing academia. Thanks to its robust build, intelligent algorithms, and payload flexibility, it is perfectly suited for complex security patrols, interactive entertainment, and providing a hands-on, high-performance platform for scientific research and education.
Rugged All-Weather Architecture
Engineered to thrive in the harshest environments. The D1 Ultra boasts a high-standard structural design with advanced material engineering, including vacuum press-formed aluminum alloy shafts and hermetically sealed, anti-corrosive core components. With enhanced dust and water resistance, it maintains stable, continuous operation across damp, muddy, splashing, and sandy terrains.
Reinforcement Learning Mobility
Powered by reinforcement learning (RL), D1 Ultra continuously adapts its gait to different surfaces and obstacles. Its intelligent locomotion system provides self-balancing, anti-tipping behavior, and disturbance rejection for stable operation across unpredictable terrain.
All-Terrain Performance
Designed for challenging environments, the robot can run at speeds up to 3.7 m/s, climb slopes reaching 30° (up to 40° maximum), jump up to 35 cm, and continuously climb stairs up to 16 cm high. These capabilities make it ideal for both indoor and outdoor deployment.
High-Torque Motor System
Each joint is powered by high-performance motors capable of delivering up to 48 N·m of peak torque. The motors are engineered for impact resistance, heavy-load tasks, and demanding operational conditions while maintaining smooth and stable movement.
Calibration-Free Deployment
Dual-encoder motor controllers eliminate the need for zero-position calibration. Simply power on the robot and begin operating immediately, reducing setup time and improving operational efficiency.
Open Development Ecosystem
D1 Ultra supports extensive customization through standardized interfaces and an open SDK. Developers can integrate sensors, communication modules, and specialized payloads while building custom applications and workflows.
Advanced Sensor & Module Compatibility
The platform supports LiDAR systems, depth cameras, RTK positioning modules, image transmission modules, and 4G/5G communication solutions. This flexibility allows deployment across research, automation, mapping, and inspection projects.
Simulation & Robotics Research Ready
Support for URDF modeling enables seamless simulation in professional robotics platforms such as Isaac Sim and MuJoCo. Developers can test and optimize robotic behaviors virtually before real-world deployment.
Specifications
- Material: Aluminum alloy with high-strength engineering plastic
- Standing Dimensions (L × W × H): 630 mm × 360 mm × 420 mm
- Folded Dimensions (L × W × H): 670 mm × 435 mm × 145 mm
- Total Weight (with battery): 16kg
- Degree of Freedom: Entire machine: 12, Each leg: 3
- Operating Temperature: 0°C ~40°C
- Ingress Protection Rating: IP54
- Battery Module: Rated capacity: 4.6Ah, Voltage: 43.2V
- Charging Duration: about 1 hour(Battery level: 10%–90%)
- Battery Life (Operating Time): 1–2 hours
- Operating Range: 6±1km
- Maximum Speed: 3.7 m/s
- Effective Payload: 5kg
- Continuous Stair-Climbing Height: 16 cm
- Maximum Climbing Angle: 30° standard, up to 40° maximum
- Vertical Jump Height: 35 cm
- Maximum Joint Torque: 48 N·m
- Joint Range of Motion (Body): –28° ~ +28°
- Joint Range of Motion (Thigh): –170° ~ –66°
- Joint Range of Motion (Calf): +35° ~ +156°
- IMU: Standard
- Camera FOV: A camera with a resolution of 1920×1080 pixels, featuring with DFOV 122°, HFOV 111°, VFOV 70°
- Standard Actions: Standing, Lying, Damping Mode, Pitch Adjustment, Height Adjustment, Horizontal Turning; Jump forward, jump up, stand on both feet, backflip, wave hello, etc.
- Real-Time Image Transmission: Supported
- Communication Features: Supported WiFi 5.0 and Bluetooth 5.0
Functional Expansion Ports: Ethernet1, USB2, Power Port2, SBUS 1, UART* 1 - Target Tracking: Supported
- Power Adapter: Standard
- Charging Dock: Standard
- Remote Control: Screen Remote Control








